Firstly, assuming you have already installed ROS Groovy and MORSE 1.x.x.
Then you need two additional packages p2os and exploration:
git clone https://github.com/allenh1/p2os.git
svn co https://svn.code.sf.net/p/bosch-ros-pkg/code/trunk/stacks/exploration
Finally, download the attachment (yz_morse_sim), decompress it and enter into the folder morse_sim.
Now, let’s start the simulation!
1. Launch roscore in a terminal window:
roscore
2. Launch MORSE simulator in a new terminal window:
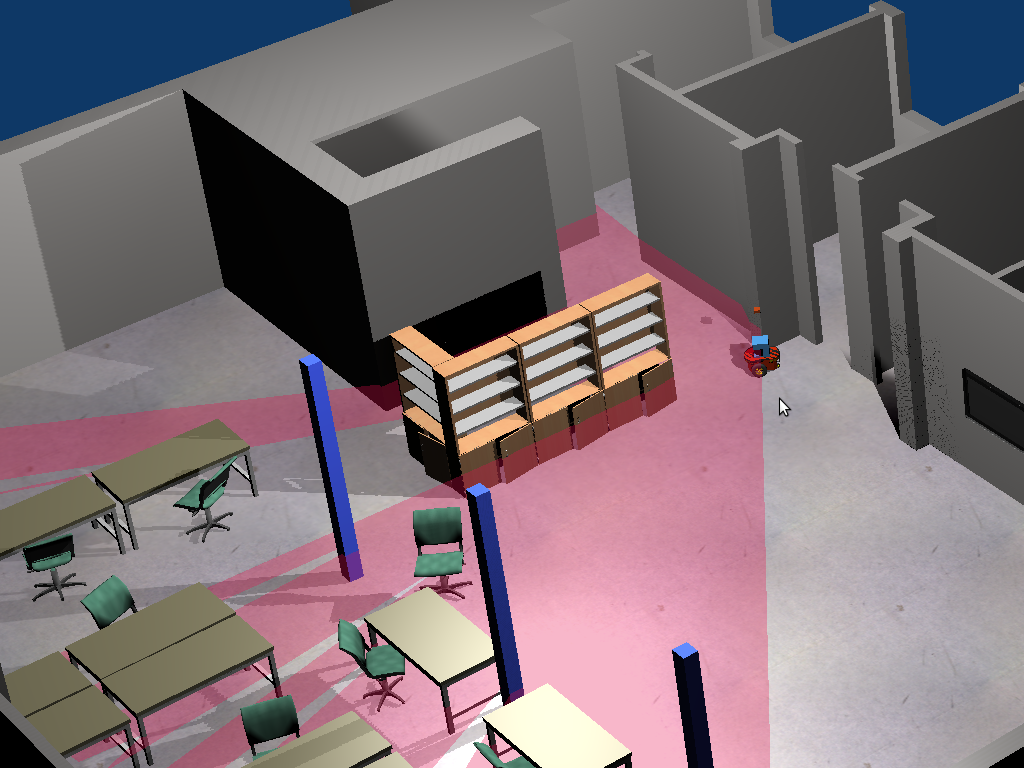
morse run single_robot.py
3. Launch ROS nodes in a new terminal window (This step will also launch gmapping and rivz):
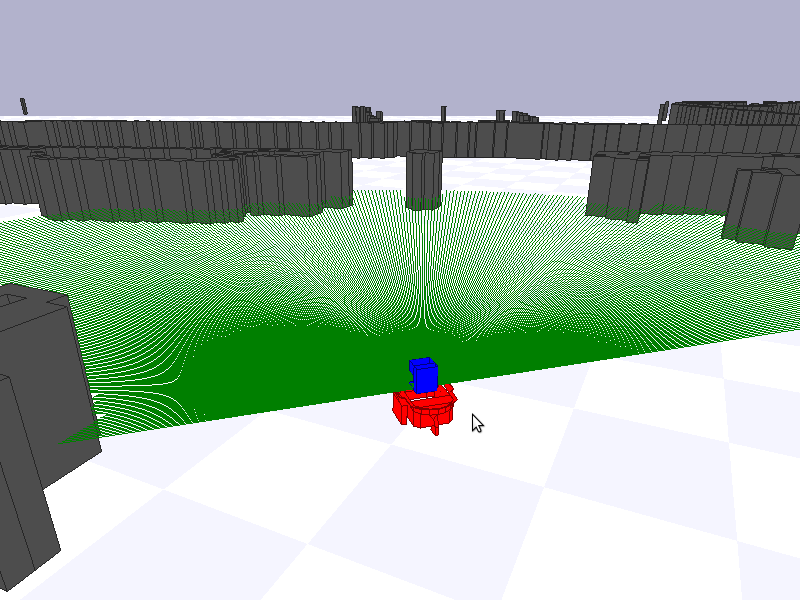
roslaunch single_robot.launch
4. Save the map if you want, in a new terminal window:
rosrun map_server map_saver
Done!