To check the accuracy of the exploration map, we need to compare with a pre-built one.
Of course, the latter needs to have a good accuracy.
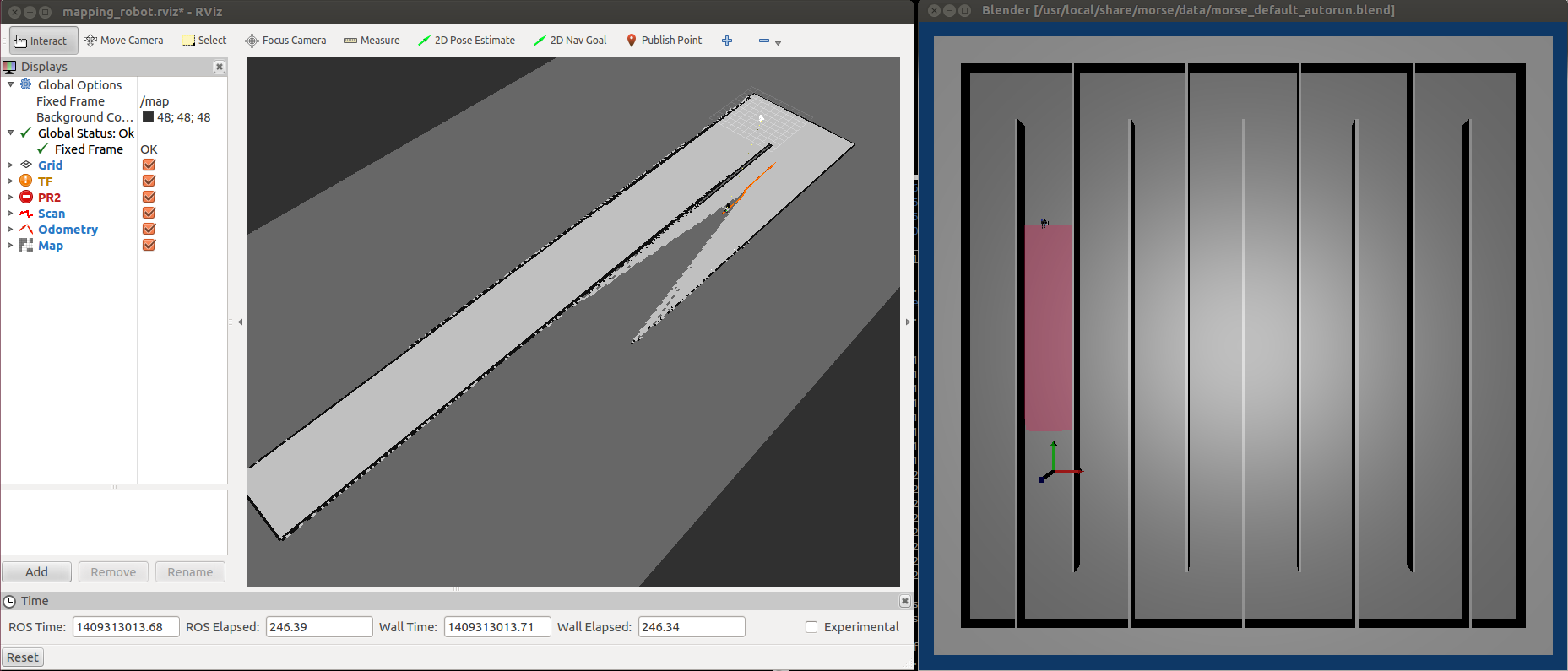
We provide here a tool to manually build an environment map in MORSE.
This tool has the following features:
- Map building using gmapping ROS package.
- Robot with perfect odometry.
- Visualize the mapping process using rviz ROS package.